









工业机器人基础教学工作站
- 咨询热线:028-87748488 0816-2758678





-
产品详情
工业机器人基础教学工作站
工业机器人不同于其他机电设备,是一种实现某种工艺过程的柔性平台,工艺种类完全由其所安装的末端执行器和配套的周边设备决定。对于工业机器
人基础教学,不能仅针对工业机器人本身的功能和操作进行教学,也不可过分专注于结合工艺实现的真实应用方式,而是要着眼于工业机器人工作站系
统,以实现工业机器人基本结构和基础操作、工作站系统调试和搭建、工业机器人及周边设备编程和通讯等内容的实训。
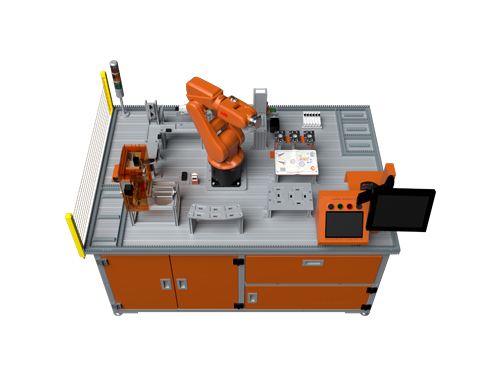
工业机器人基础教学工作站-站位型,如图1所示,由工业机器人、基础实训台、综合实训台、工具及工具库、操控台、安全组件和配套设施组成,针对
职业院校的教学特点,综合理、虚、实一体化教学特征,选用性能优良的设备,采用最新自动化技术,融合“智能制造、智慧工厂”理念,采用“模块
化、简易化”设计方法,可充分学习工业机器人及其周边应用技术,确实掌握相关实操技能,不减少实训项目和真实工厂应用特点的前提下尽可能确保
教学过程的方便、安全。
工业机器人基础教学工作站-站位型主要应用在工业机器人基础操作教学阶段,可以实现工业机器人基本结构、基础操作、参数配置、在线示教编程、简
单语言编程、工具更换、复杂轨迹规划及编程、模拟上下料和码垛工艺应用、模拟涂胶和打磨抛光工艺应用、IO通讯及工业以太网总线通信、离线编程
应用等教学内容,实训房式设计特别适合于车间型实训基地,为学生掌握基础编程能力和调试技能提供硬件支撑,满足教学需求。

图1工业机器人基础教学工作站-站位型
.2 技术参数
l 输入电源:交流三相五线制380V,频率50Hz
l 额定功率:5kW
l 安全保护:急停开关、漏电保护、短路保护、过载保护
l 整体尺寸:3000mm×3500mm×2000mm(可根据场地实际情况定制)
.3 实训项目
l 工作站结构认知
l 关键设备的特性和参数设置
l 工业机器人及周边设备的维护及典型错误排查
l 工业机器人手动控制及基本参数设置
l 工业机器人IO通信及PLC信息交互
l 工业机器人单轴运动与线性运动控制
l 工业机器人工具TCP参数标定
l 工业机器人工件坐标系参数标定及多坐标系切换
l 基于关键点的轨迹编程(精确定位/圆弧逼近)
2020/10/16 工业机器人基础教学工作站 - 工科产品 - 河南嵩之岳电子科技有限公司
2/11
l 基于样条曲线的轨迹编程
l 条件判断语句的用法及编程
l 循环语句的用法及编程
l 子程序的编程及调用
l 模拟码垛工艺应用编程
l 模拟上下料工艺应用编程
l 模拟工件的拾取应用编程
l 以工件坐标系为基准的轨迹编程
l 模拟涂胶工艺应用编程
l 模拟打磨抛光工业应用编程
l 工业机器人与PLC的通讯与联调
l 基于RobotArt的工作站搭建与配置
l 基于RobotArt的简单平面轨迹离线编程应用
l 基于RobotArt的复杂空间轨迹离线编程应用
l 基于RobotArt的模拟搬运码垛离线编程应用
l 基于RobotArt的模拟上下料离线编程应用
l 基于RobotArt的写字绘图离线编程应用
.4 主要配置
l 工业机器人:ABB IRB 1410、KUKA KR5 Arc、STEP SA1400、FANUC R-0iB
l PLC:SIEMENS、OMRON、MITSUBISHI
l 模拟工艺:搬运、码垛、上下料、焊接、涂胶、打磨
l 气动组件:AirTAC、SMC
l 电气组件:OMRON、Schneider、Rittal
.5 核心功能
工业机器人基础教学工作站(站位型)根据教学内容和复杂度分为基础教学部分和综合教学部分,互相配合补充满足实训要求。基础教学部分以基础操
作和轨迹编程为教学核心,工业机器人配合笔形工具在轨迹图板上实现TCP参数标定、坐标系定义及变换、不同类型轨迹规划等实训内容,结合工具架
和模拟工件完成典型工艺模拟应用实训。综合教学部分以模拟生产流水线为主线,利用工业机器人实现取料、搬运、上下料,将整个过程流畅地串联起
来,配合与PLC的联动控制,真实模拟工厂应用效果,提高综合应用能力。
工作站选用小负载大臂展工业机器人用来将所有加工工序串联起来,可根据学校需求更换不同品牌近似规格型号的产品,为确保设备使用一贯性和稳定
性,建议采用瑞士ABB品牌的IRB 1410型、德国KUKA品牌的KR5Arc型、中国STEP品牌的SA 1400型和日本FANUC品牌的R-0iB型,如图2所示,四款
工业机器人的额定负载、工作范围和重复定位精度基本相同,满足工作站使用要求。
气动抓手,如图3所示,采用德国SCHUNK品牌采用高性能气动驱动组件实现动作,通过间隙最小的交叉滚子导轨实现精确抓取,椭圆形驱动活塞实现
最大抓取力,可通过电磁开关进行检测确保过程可靠性,结构材料采用铝合金并进行防锈处理。气动抓手根据不同应用环境有三种状态:轨迹编程中用
于夹持笔形工具、码放物体时用于抓取模拟物料、模拟涂胶及打磨抛光应用时用于抓取模拟工件。
图3气动抓手
基础实训台配合工业机器人可完成工业机器人操作方式选择、速度调整、坐标系设定及手动操作机器人等基础操作实训,程序编写、启动执行程序和停
止程序等运动编程实训,机器人零点设定及系统维护等技能实训,工具TCP标定、基坐标系设置、复杂运动轨迹编程、子程序练习等能力实训。工具架
包含工具库、物料库及固定工具支架,工具库可同时存放3个笔形工具,具有笔形工具到位检测功能,料块库可同时存放15个模拟物料,笔形工具固定
支架配合模拟工件可以进行模拟焊接、涂胶、打磨实训,采用工具固定、工业机器人夹持工件完成加工工艺过程,丰富实训操作内容。基础实训台、工
具架及模拟工具如图4所示。
2020/10/16 工业机器人基础教学工作站 - 工科产品 - 河南嵩之岳电子科技有限公司
3/11
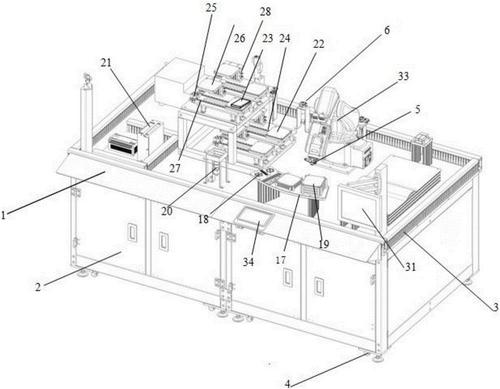
图4基础实训台、工具架及模拟工件
综合实训台上合理分布有模拟上下料组件和模拟码垛组件,用来模拟真实工厂流水线加工作业过程,通过工业机器人的配合确保生产线正常运行,组件
采用铝合金型材为结构支撑件,利用气缸和步进电机实现驱动,配合类型丰富的传感器检测物料位置及气缸运行状态,如图5所示。综合实训台用来进行
工业机器人结合工艺应用的综合实训,可完成工业机器人模拟上下料实训、模拟码垛实训、模拟生产线综合实训,提高学生对工业机器人结合应用的综
合复杂操作及编程能力,使学生掌握工业机器人基本技能后可将其综合应用于实际需求,增加工业机器人操作应用经验。
图5综合实训台
综合实训台上所有设备的联动控制通过高性能PLC实现,如图6所示,提供多种品牌选择以适应学校前期基础教学,确保延续性,同时在型号选择时以应
用范围广、性能优良为先,使用模块化设计产品提高系统组态灵活性,包含丰富的应用模块增加实训内容,也为后期技术升级和改造留有接口。
图6 PLC组件
操控台由操作面板、IO组件和触摸屏构成,布置在工作站正前方,实现对工作站的运行控制和IO实训操作,实训时可将参考资料和教材放置于上面,如
图7所示。操作面板由钥匙开关、指示灯和按钮组成,可实现对工作站运行控制、模式切换、状态监控和急停操作,通过按钮也可对模拟生产线工作台的
运行进行控制。IO组件数字量IO由绿色指示灯和拨位开关构成,实现与PLC和工业机器人数字量IO模块的通信控制。触摸屏作为人机交互接口,7寸TFT
真彩液晶屏,分辨率800×480,支持PROFINET总线通讯,可以实现对工业机器人运行模式和程序控制、模拟生产线工作台相关气动元件和电动元件控
制、工作站运行监控等功能。
图7操控台
2020/10/16 工业机器人基础教学工作站 - 工科产品 - 河南嵩之岳电子科技有限公司
4/11
为保证工业机器人及周边设备安全,在工业机器人手部安装工艺工具时都会加装防碰撞传感器,确保及时感测到工业机器人末端工具与周边设备或人员
发生碰撞并立即停机。工作站为丰富实训内容、贴近真实应用效果、提高设备安全,选用德国SCHUNK品牌气动机器人防碰撞传感器,如图8所示。防
碰撞传感器有效保护机器人和操作设备,防止由碰撞或超负荷造成设备损坏,提供了可靠的电信号监测、线缆断裂监控功能,利用特殊结构达到只在一
个位置卡入,由此在超负荷后零点始终一样,确保定位精度,同时无预定断裂位置,而是在发生碰撞后的简单手动重新定位,简化操作步骤。
图8防碰撞传感器
工作站提供了安全围栏,将人员与设备物理隔离,保证安全,如图9所示。安全围栏由铝合金和钢化玻璃构成,安装有关门检测传感器防止工业机器人运
行中人员进入引发危险,提供三色报警灯提示工作站当前状态,并在多个显著位置设置系统急停开关,可在发生危险时及时停止设备运行。
图9安全围栏
工业机器人基础教学工作站-多工艺CHL-JC-11 多工艺
.1 产品介绍
工业机器人是机电一体化技术的集中体现平台,通过与不同电气设备和加工工艺结合可完成制造过程中多个工序要求,是实现智能制造的最优执行终
端。对于工业机器人实操教学,绝不能仅局限于工业机器人本身的功能介绍和操作实训,而是要着眼于工业机器人工作站系统,将工业机器人、机械结
构、自动控制、传感器应用、气动驱动、视觉检测等通用技术融合集成,配合多种工艺实现,以工业机器人为核心平台,实现综合教学实训过程。
工业机器人基础教学工作站-多工艺,如图1所示,针对基础操作和工艺应用两个方面分别进行针对性优化开发,采用模块化集成设计,将多项主流应用
技术融入工作站的功能之中,结合职业院校的教学特点,综合了“理-虚-实”一体化教学特征,以典型实训任务为出发点,采用模块化设计理念,让学
生在学习过程中具有明确的目标性,增强学习兴趣,可以利用单一工作站解决工业机器人基础教学过程中涉及的教学点和技能点,提高实训设备的利用
率。
工业机器人基础教学工作站-多工艺主要应用在工业机器人基础操作教学阶段,针对工业机器人基本参数设置、轨迹编程以及结合周边应用设备和模拟加
工工艺的实训教学,该工作站以工业机器人为平台,融合了自动控制、加工工艺、视觉检测、标签识别、装配检测等综合技术,是进行工业机器人技术
教学的最佳硬件平台,有助于学生从系统级了解工业机器人的应用方式的操作方法,完善基础技术操作能力和调试技能,满足多层次个性化教学需求。
图1工业机器人基础教学工作站-多工艺
.2 技术参数
l 输入电源:交流单相220V,频率50Hz
l 额定功率:5kW
2020/10/16 工业机器人基础教学工作站 - 工科产品 - 河南嵩之岳电子科技有限公司
5/11
l 安全保护:急停开关、漏电保护、短路保护、过载保护
l 整体尺寸:3000mm×1500mm×1500mm
.3 实训项目
l 工作站结构认知
l 关键设备的特性和参数设置
l 工业机器人及周边设备的维护及典型错误排查
l 工业机器人手动控制及基本参数设置
l 工业机器人IO通信及PLC信息交互
l 工业机器人单轴运动与线性运动控制
l 工业机器人工具TCP参数标定
l 工业机器人工件坐标系参数标定及多坐标系切换
l 工业机器人多类型工具快速更换
l 工业机器人第七轴运动控制
l 简单平面轨迹、复杂空间轨迹编程
l 物料搬运与码垛实训
l 活塞取料及激光切割加工实训
l 活塞加工后去毛刺、打磨、抛光实训(手持零件及手持工具)
l 活塞智能视觉检测及残次品剔除实训
l 活塞良品贴条码及条码数据采集实训
l 活塞、缸体、连杆、活塞销、曲轴销的装配实训
l 活塞发动机功能检测及入库实训
l 基于RobotArt的工作站模型环境搭建与配置
l 基于RobotArt的简单平面轨迹及复杂空间轨迹离线编程应用
l 基于RobotArt的写字绘图离线编程应用
l 基于RobotArt的搬运码垛工艺离线编程应用
l 基于RobotArt的激光切割工艺离线编程应用
l 基于RobotArt的去毛刺工艺离线编程应用
l 基于RobotArt的打磨工艺离线编程应用
l 基于RobotArt的抛光工艺离线编程应用
l 基于RobotArt的装配工艺离线编程应用
.4 主要配置
l 工业机器人:ABB IRB 120、KUKA KR6 R700、STEP SD500、FANUC LR Mate 200iD
l PLC:SIEMENS、OMRON、MITSUBISHI
l 模拟工艺:激光切割、去毛刺、打磨、抛光、装配、检测
l 机械快换:EINS
l 视觉检测:OMRON、KEYENCE
l 伺服驱动:MITSUBISHI
l 气动组件:AirTAC、SMC
l 电气组件:OMRON、Schneider、Rittal
.5 核心功能
工业机器人基础教学工作站(多工艺)根据教学内容和复杂度分为基础教学部分和综合教学部分,如图2所示。基础教学部分以基础操作和轨迹编程为教
学核心,工业机器人配合定制工具在3D轨迹图板上实现TCP参数标定、坐标系定义及变换、不同类型轨迹规划、模拟搬运码垛等实训内容。综合教学部
分以活塞发动机的加工装配过程为主线,融合多种先进技术,实现不同加工工艺,提高综合应用能力。
图2工作站布局
工作站选用桌面型工业机器人用来将所有加工工序串联起来,可根据学校需求更换不同品牌近似规格型号的产品,为确保设备使用一贯性和稳定性,建
议采用瑞士ABB品牌的IRB 120型、德国KUKA品牌的KR6 R700型、中国STEP品牌的SD 500型和日本FANUC品牌的LR Mate 200iD型,如图3所示,
四款工业机器人的额定负载、工作范围和重复定位精度基本相同,满足工作站使用要求。
2020/10/16 工业机器人基础教学工作站 - 工科产品 - 河南嵩之岳电子科技有限公司
6/11
图3可选工业机器人型号
为扩展工业机器人的有效工作范围,通常采用增加外部行走轴实现扩展,如图4所示,使工业机器人可在一定直线范围内自由移动,单一机器人完成多个
工位的操作。为确保高精度定位和平稳运行,外部行走模块采用滚珠直线滑轨支撑,精密滚珠丝杠传动,高性能伺服电机配合行星齿轮减速器驱动,有
效降低成本同时大大丰富了教学内容。
图4外部行走模块
自动化工厂中,需要众多设备协调配合才能保证正常运转,这其中PLC控制系统是实现联合控制的首选设备。工作站的总控单元同样选择了自动化控制
领域最为通用的PLC作为核心,如图5所示,提供多种品牌选择以适应学校前期基础教学,确保延续性,同时在型号选择时以应用范围广、性能优良为
先,使用模块化设计产品提高系统组态灵活性,包含丰富的应用模块增加实训内容,也为后期技术升级和改造留有接口。
图5PLC组件
工业机器人应用的关键是复杂工作轨迹的精确再现,轨迹规划的优劣和编程技巧的好坏将直接确定轨迹执行的最终效果。基础教学部分以3D轨迹图板为
核心,工业机器人利用笔形工具,依据图板上已绘制的各种坐标系和直线、圆弧、曲线等不同轨迹,结合拱形起伏创造立体效果,可以让学生脱离工艺
应用,完全掌握工业机器人的操作技能和编程方式,如图6所示。利用3D轨迹图板进行基础轨迹编程教学,利用描图的直观效果评价轨迹编程优劣,便
于学生强化基础编程技能,掌握轨迹规划技巧,在脱离工艺应用的情况下,将教学重点放在工业机器人上,为工业机器人与周边设备和控制系统的配合
实现打下牢固基础。同时,基础教学部分还提供了模拟搬运码垛和离线编程写字实训项目,丰富教学内容,提高学习兴趣。
图63D轨迹图板
综合教学部分由外部行走模块、快换工具、自动上料模块、加工制造模块、视觉检测模块、智能装配模块和智能料库组成,以活塞发动机为主线,如图7
所示,需要经过出库取料、激光切割、去毛刺、打磨、抛光、视觉检测、标签识别、装配等一系列复杂工序后,才能实现活塞发动机的产品生产,期间
需要工业机器人与不同加工设备、控制系统、气动元件、检测传感等组件进行配合,真实模拟再现了工厂对工业机器人的应用方式,在充分学习工业机
器人及其应用技术的同时,让学生体验智能制造。
2020/10/16 工业机器人基础教学工作站 - 工科产品 - 河南嵩之岳电子科技有限公司
7/11
图7活塞发动机组成
工业机器人工具种类直接决定了工业机器人的应用功能,如图8所示,6种不同功能的工具覆盖了活塞发动机生产的完整过程,多个工具都采用复合设
计,以实现不同的工艺功能。每个工具均采用工业级机械快换组件,如所示,实现了无需人为干预,工业机器人可在不同工具间自由切换,同时确保气
路、电路信号通信正常,大大扩展了工业机器人的应用能力。夹爪/笔工具是双功能复合工具,笔可以用来在3D轨迹图板上描绘轨迹实现基础教学,夹
爪是在活塞零件上料时实现夹持功能;激光头/吸盘工具是双功能复合工具,激光头可模拟激光切割头实现加工工艺,吸盘工具可用来将切割后的活塞废
料取出;夹爪工具是单功能工具,用于稳定抓取活塞零件实现去毛刺、打磨、抛光加工;夹爪/吸盘工具是四功能复合工具,夹爪端采用特殊设计,内侧
可夹持活塞销,外侧可夹持活塞杆,同时完全闭合时可利用前端将活塞销顶入到位,吸盘工具则用于在曲轴销装配时吸住活塞零件端面并固定位置;搬
运吸盘工具为单功能工具,用于稳定吸取活塞缸。
图8机械快换及工具
活塞零件的出库取料工艺是由工业机器人配合自动上料模块完成,如图9所示,垂直料库用于存放活塞原料,可实现依次入库和出库,传送带可将出库的
活塞原料运送到取料点。自动上料模块中包含了伺服电机控制、步进电机控制、气动控制、传感器采集等技术,是工业机器人实现自动上下料工艺所必
须常用技术,也是工业机器人系统应用的典型方式。
图9自动上料模块
为实现活塞由原料到产品的加工过程,需要依次经过激光切割、去毛刺、打磨和抛光工艺,如图10所示,工作站提供了小功率激光器用以模拟激光切割
工艺,电动切削头实现加工面边缘去毛刺工艺,桌面型砂带机实现加工面打磨工艺,微型抛光轮实现零件整体抛光工艺。同时为丰富应用方式,激光切
割加工采用工业机器人手持激光器实现加工,其余三种工艺均为工业机器人手持工件完成加工。由于编程轨迹相对复杂,精度要求高,传统示教编程难
度较大,利用工作站配套的离线编程软件可以方便快捷地生成所需要的精确轨迹及控制程序,提高效率。
2020/10/16 工业机器人基础教学工作站 - 工科产品 - 河南嵩之岳电子科技有限公司
8/11
图10活塞零件制造加工过程
为剔除已存在的残次品,工作站利用高精度CCD组件配合分度盘转台实现活塞零件端面LOGO的自动检测,如图11所示,并将检测结果传送到机器人控
制器判断是否将该检测零件放置到废料区。并对质量合格产品进行条码编号,读取信息进行存储,达到加工过程可追溯。
图11视觉检测及条码标识
完成活塞零件加工后,工业机器人配合不同的工装实现活塞发动机的装配及测试,如图12所示。整个装配需要经历活塞与活塞杆装配、活塞杆与曲轴装
配和活塞发动机功能测试三个工序,装配过程复杂但明晰,充分地将工业机器人的柔性灵活和与周边设备的配合体现出来,达到综合实训的目的。完成
装配后,可利用检测工位对装配效果进行验证,通过步进电机驱动曲轴旋转以实现活塞往复运动,则成功完成活塞发动机的生产,可放入成品库中存
储。
图12活塞发动机装配流程
工作站操控台上集成了工作站的运行控制和模式切换功能,可以在出现危险紧急停止工作站的运行,并提示故障警报。工业机器人系统调试是应用技术
中的必备技能,工作站在操控台上提供了多个内置故障设置点,通过不同的故障设置组合方式,可以对各个设备间的接线进行人为设置故障用来模拟真
实情况,锻炼学生的错误排查能力和解决问题技能,如图13所示。
图13操控台故障设置点
随着工业机器人应用领域扩展,要求其轨迹编程精度和复杂度大幅度提升,传统的示教编程已经完全无法满足应用要求。离线编程技术可以实现基于精
2020/10/16 工业机器人基础教学工作站 - 工科产品 - 河南嵩之岳电子科技有限公司
9/11
确的CAD数据进行轨迹规划,对异性曲线和曲面有更好的贴合算法,解决了去毛刺、打磨等工艺应用难题。工业机器人多工艺基础教学工作站与
RobotArt软件深入融合,与3D轨迹图板配合可实现异性曲线绘制和写字绘图趣味实验,与工艺应用部分配合可完成激光切割、去毛刺、打磨、抛光等
加工工艺轨迹的编制,如图14所示,也可以在虚拟环境中提前验证编程结果,实现轨迹有效性与物体间碰撞检查,提高真实设备的使用率。
图14RobotArt离线编程应用
工业机器人分拣实训工作站 CHL-GY-19
.1 产品介绍
分拣作业是流水线上的重要环节,基于智能视觉的工业机器人与人工相比,不但高效、准确,而且在质量、卫生等保障能力有着无法替代的优势。与传
统的机械分拣作业相比,基于智能视觉的工业机器人分拣则有着适应范围广、随时能变换作业对象和变换分拣工序的优势,在机械、食品、医药、化妆
品等领域已经广泛应用,如图1所示。
图1工业机器人自动流水线上分拣操作
工业机器人分拣实训工作站以真实工厂应用要求为基础,优化功能设计,提高系统灵活度,融入实训教学过程,为具有一定工业机器人基础操作技能的
学生提供结合视觉实现分拣工艺的实训平台,如图2所示。工业机器人分拣实训工作站由工业机器人、智能视觉系统、输送装置、上料装置、安全防护组
件及配套设备构成,利用工业机器人这一柔性执行单元,结合去毛刺工艺实现的实际加工单元,可以完成对不同形状、不同颜色的零件进行智能分拣。
在学生充分学习工业机器人基础操作后,完全掌握参数设置、轨迹编程等技能基础上,结合智能视觉技术完成与真实工厂应用相同的实训项目,了解分
拣工作站的构成及维护,缩短岗前培训过程,提高就业竞争力。
图2工业机器人分拣实训工作站
工业机器人分拣实训工作站是实现自动分拣的实训平台,利用工业机器人配合智能视觉相机,可在传送带定速运行的状态下对随机摆放物料的颜色、轮
廓和位置进行特征识别和提取参数,工业机器人准确定位零件位置并抓取,极大地提高了工作效率和准确率,降低产品破损率。
.2 技术参数
2020/10/16 工业机器人基础教学工作站 - 工科产品 - 河南嵩之岳电子科技有限公司
10/11
l 输入电源:交流单相220V,频率50Hz
l 额定功率:4kW
l 安全保护:急停开关、漏电保护、短路保护、过载保护
l 整体尺寸:3000mm×3500mm×2000mm(可根据场地实际情况定制)
.3 实训项目
l 工作站结构认知
l 并联工业机器人的基本操作特点
l 并联工业机器人的手动控制及简单编程实训
l 关键设备的特性和参数设置
l 工业机器人及周边设备的维护及典型错误排查
l 吸盘工具TCP参数标定
l 智能视觉系统的参数设置及应用实训
l 智能视觉系统针对不同颜色零件的识别实训
l 智能视觉系统针对不同形状零件的识别实训
l 输送装置与上料装置的参数设置及操作实训
l 工业机器人与输送装置的联调实训
l 工业机器人与智能视觉系统的联调实训
l 工作站整体运行联调实训
.
4 主要配置
4 主要配置
l 工业机器人:ABB IRB 360
l 视觉组件:COGNEX、OMRON
l 电气组件:OMRON、Schneider、Rittal
.5 核心模块
ABB IRB 360依靠运动性能佳、节拍时间短、精度高、负载大等特性,一直处于拾料和包装技术的领先地位,占地面积小,节约安装空间。ABB IRB
360,如图3所示,具有3kg的额定负载,最大工作直径1130mm,所有金属部件均采用不锈钢材质,可以应用于食品、医药等行业,表面平滑易清洁,
润滑万向节具有极佳的耐腐蚀性。利用PickMaster.软件可轻松设置应用程序,简化了系统配置过程,提升高速拾料操作效率。TrueMove.和
QuickMove.功能确保了工业机器人的最佳运行速度和路径精度,可实现工业机器人对快速传送带的高精度跟踪,提高分拣应用的调试效率。
图3 ABB IRB 360工业机器人
工作站选用与ABB工业机器人配套的智能视觉系统,如图4所示,对工人的经验以及编程时间要求降到最低。ABB集成视觉系统得到Cognex的助力,采
用目前最新进的视觉采集和处理技术,可在生产车间最具挑战性的条件下工作。该视觉系统直观且易操作,能够自动选择特征并拟出参数,使配置时间
最小化,在最具挑战性的视觉应用中亦能取得极为可靠的成果。ABB集成视觉系统可以堪称是机器人视觉技术的一次真正意义上的变革,它具备强大的
视觉工具、自动对焦、集成照明和光学器件、更快速的影响捕捉、驱动和控制各类外部照明的能力以及进行任何目视检查的输入/输出能力。
图4智能视觉系统
工业机器人分拣实训工作站采用模块化设计的皮带输送装置,如图5所示,通过调速电机驱动,配套高精度编码器测量当前速度和位置信息,使得工业机
器人可对其运行状态进行跟踪监测,自动补偿工业机器人运行位置。输送装置前端安装有振料盘,可以将模拟物料随机地放置到输送带上,模拟真实工
厂的原料来源。
图5输送装置
2020/10/16 工业机器人基础教学工作站
11/11
工作站提供了安全围栏,将人员与设备物理隔离,保证安全,如图6所示。安全围栏由铝合金和钢化玻璃构成,安装有关门检测传感器防止工业机器人运
行中人员进入引发危险,提供三色报警灯提示工作站当前状态,并在多个显著位置设置系统急停开关,可在发生危险时及时停止设备运行。
产品分类
